Интересное схемотехническое решение контроллера шагового двигателя
Многоосевые драйвера Oriental Motor позволяют управлять шаговыми двигателями серии AZ с абсолютным энкодером и другими устройствами на их основе, благодаря чему они отлично подходят для создания ЧПУ-систем средней мощности, таких как гравировальные, фрезерные, резательные, сварочные станки, координатные столы, медицинское оборудование и т. Для питания драйверов используется напряжение 24 и 48 В. Драйверы серии MX были разработаны с использованием прогрессивных алгоритмов компании Leadshine и современных DSP технологий для более простой и быстрой коммутации шаговых двигателей в устройствах с 3 и 4 осями.



")






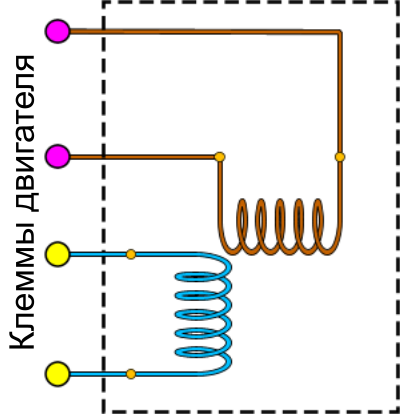
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода рис. Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки.




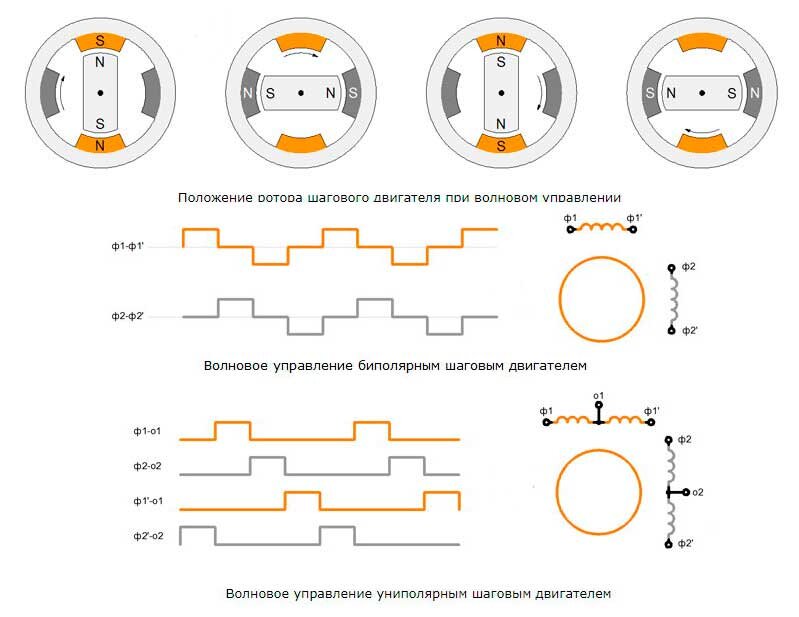
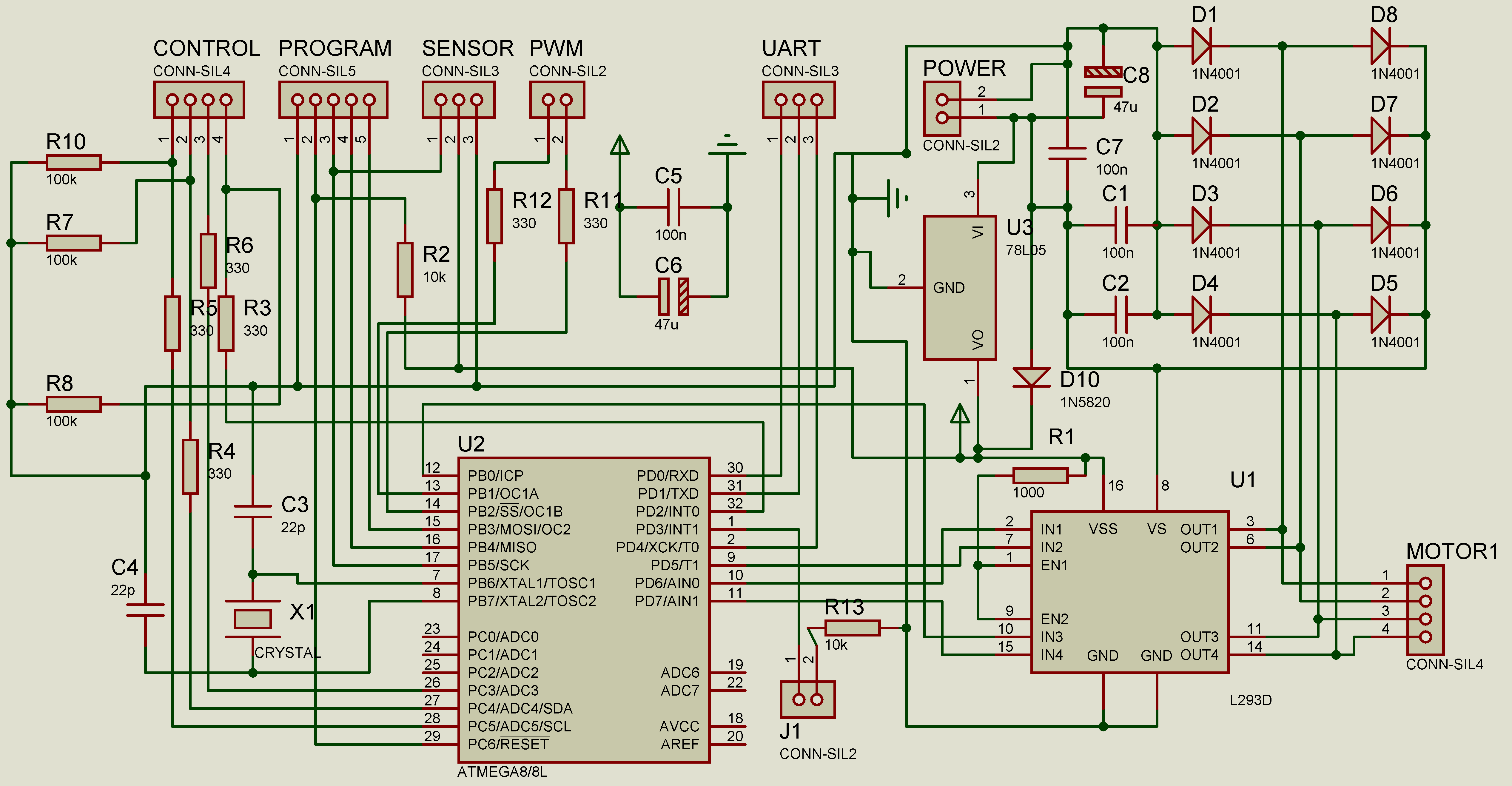
С помощью драйвера LN подключим к плате Ардуино биполярный шаговый двигатель. Для управления будем использовать программы из предыдущих уроков для униполярных двигателей. Предыдущий урок Список уроков Следующий урок. У биполярного шагового двигателя две обмотки, по одной для каждой фазы.