Приводы бывают разные…
Шаговый и бесколлекторный двигатели во многом похожи друг на друга. Рассмотрим их основные особенности, различия и попробуем определить, какой двигатель лучше. В предыдущем материале — «Двигатели бывают разные», мы предельно кратко рассмотрели основные виды существующих низковольтных синхронных двигателей постоянного тока и сказали несколько слов о принципах их работы. При этом, мы намерено не углублялись в детальное рассмотрение особенностей устройства и принципов работы этих двигателей и, тем более, в сравнение различных типов двигателей с точки зрения их рабочих характеристик и особенностей эксплуатации. Это большая, отдельная и неоднозначная тема для разговора и часть этого вопроса мы попробуем рассмотреть далее.











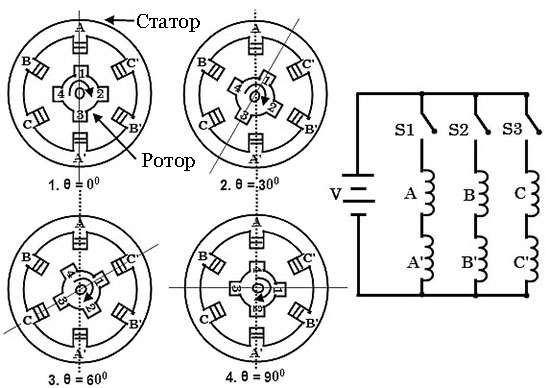
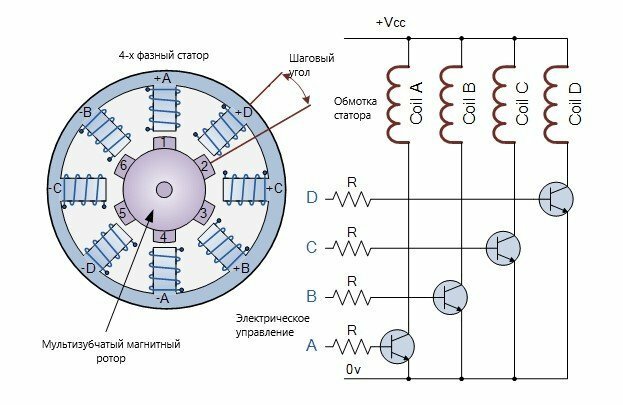
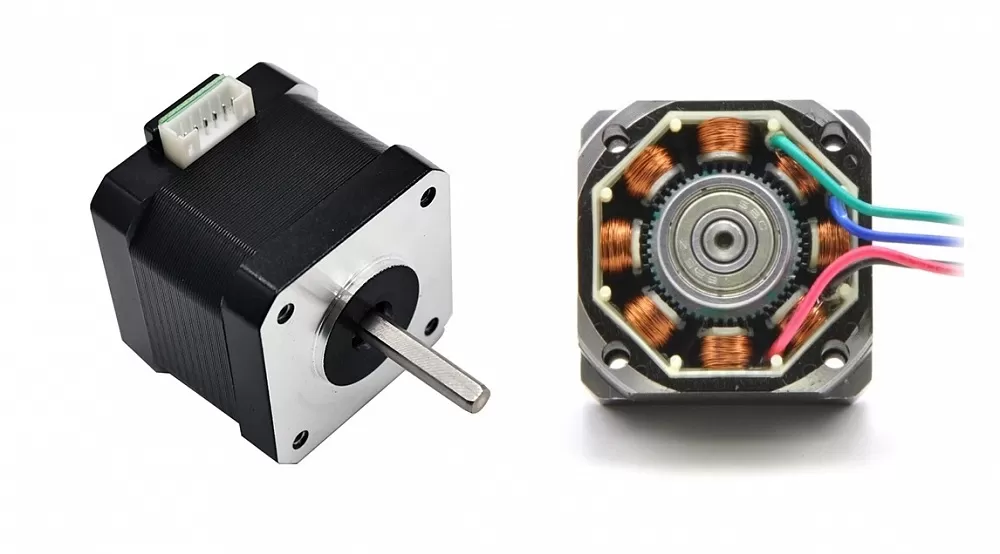
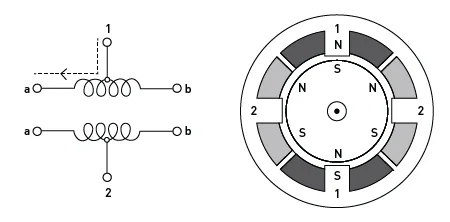
В связи с развитием цифровой вычислительной техники разрабатывают и совершенствуют исполнительные элементы дискретного действия и, в частности, электрические шаговые двигатели. Шаговыми называют синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота вала или фиксированное перемещение без датчиков обратной связи. Шаговые двигатели выпускаются мощностью от единиц микроватт до киловатта, то есть в основном, это микродвигатели малой мощности.









Главной изюминкой драйвера является возможность управлять вращением шагового двигателя без внешнего импульсного устройства. Это обеспечивается за счет встроенного генератора импульсов, частота которых определяется напряжением, подаваемым на вход 0 — 5В драйвера. Причем, это напряжение может быть взято как от внешнего источника например выходной сигнал напряжения с какого-либо контроллера так и от самого драйвера.